
石化行业常用腐蚀监测技术综述
0前言
管道腐蚀状态检测主要分为离线和在线。离线检测(Off-line test)的技术方法很多,例如射线法,C扫描,导波法,涡流法,漏磁法,超声波离线测厚法等等。在线检测一般称为监测(Monitoring)。本文作者在实际调研中了解到,石化行业中最为常用的是油气金属管道监测技术有挂片失重法[1]、电阻探针法、电感探针法[2,3]、超声波在线测厚法[4]。另外,本文对近几年发展很快,且综合技术优良的场指纹法(Field Signature Method,FSM)进行了介绍,着重说明FSM的工作原理、现场应用情况以及它的特点和局限性。通过阐述这五种技术的发展现状、工作原理以及存在的优缺点,为企业提供有益的参考。
1 挂片失重法
挂片失重法作为石化行业内最为传统和原始的腐蚀监测技术之一,它的出现标志着腐蚀监测技术的开始[5]。挂片的种类可分为四种,分别为[6]:条状挂片、棒状挂片、带内倒角的圆盘状挂片和普通圆盘状挂片。如图1所示。
图1 常用的四种挂片
挂片失重法的主要工作原理是将腐蚀挂片置于一个管道的流体场中,在一定时间后,将腐蚀挂片取出、清洗和精密称重。通过腐蚀时间周期、挂片表面积和损失的重量等,计算出该腐蚀挂片的腐蚀量和速率,进而间接地推断管道内壁的腐蚀量和腐蚀速率。鉴于计算方法比较简单和公知,本文不作计算方法的描述。
挂片失重法有明显的优点和缺点[7-10],该方法的优点是:
(1)工作原理简单。可用于不同介质的测量环境,例如:气体、液体、颗粒等可以实现目检。在流体呈静态或准静态以及腐蚀比较轻微的状态下,能被现场操作人员广泛接受;
(2)价格低廉。这也是石化行业普遍使用这种监测方法的重要原因;
(3)由于挂片发生腐蚀后,腐蚀沉积物会留在腐蚀挂片上,取出挂片后可以观察和分析腐蚀沉积物;
(4)挂片失重法是行业内测量降阻剂腐蚀性的标准方法,因此,它可以作为标杆,来衡量其他测量降阻剂腐蚀性的方法的可行性[8]。
该方法局限性和缺点是:
(1)腐蚀周期较长。一般暴露时间为30~90天,无法测量短期内的腐蚀波动,无法反映工艺参数的快速变化对腐蚀速度的影响[11-12];
(2)在一些高压有毒的环境下,由于只有在管道上开孔才能放入挂片,容易造成石油或者有毒气体的泄露,危险性高;
(3)只能间接推算测量管道的均匀腐蚀情况,不能测量局部腐蚀和坑蚀等,作用比较局限;
(4)在一些腐蚀比较恶劣的环境中,数据偏差极大,容易出现挂片被腐蚀断裂的现象[13],导致监测失败。如图2所示,为某场站使用的腐蚀挂片,在使用了不到一个监测周期的时间里即断裂失效。
图2 腐蚀挂片断裂图
2 电阻探针法
电阻探针法起源干二十世纪二十年代,最开始是应用于大气腐蚀的研究,到了二十世纪五十年代,基于探测与测量电阻值变化的腐蚀监测技术得到使用,这种基干电子挂片的测量方法即电阻探针法[14,15]。如图3所示为ER7100电阻探针[16]。当敏感元件受到腐蚀时,其厚度和截面积随之减少,所测电阻值增大,通过电阻值的变化来推算腐蚀量,进而得到腐蚀速率[17]。目前电阻探针法广泛应用于石化行业的管道腐蚀监测中,例如左慧君[18]等将MS3500E电阻探针成功应用于炼油设备,在线监测其腐蚀状态。
图3 ER7100电阻探针
由于丝状电阻探针比片状电阻探针灵敏度要高,所以常采用丝状电阻探针,具体的工作原理是[19]:对金属丝加一恒定电流,当金属电阻丝受到腐蚀时,截面积减小,而金属丝的长度保持不变,通过金属丝两端电压的变化得到金属丝直径的变化,就可以计算出电阻探针的腐蚀速度。如果电阻的材质与所测量的管道一致,所计算的腐蚀速度和厚度可以近似地代表所测管道的腐蚀速度和厚度。
在测量过程中为消除温度变化对电阻值的影响,在电阻探针结构上增加了温度补偿单元,将补偿电阻与测量电阻串联在电路中,因此,腐蚀速度计算公式如下[19]:
其中,r为金属丝的初始半径(mm);h为腐蚀深度(mm);V为年腐蚀速度(mm/a);T为腐蚀周期时间(h),R0为腐蚀前探针电阻和温度补偿电阻的比值,Rr为腐蚀后探针电阻和温度补偿电阻的比值。
电阻探针法测量腐蚀速度的优点是[16-17]:
(1)可用于不同介质的测量环境,例如:气体、液体、颗粒等;
(2)数据便于分析,可实现数据的实时采集;
(3)监测过程中不必将试样取出;
(4)相比于挂片失重法,响应速度较快,试验周期要短得多。桑绍雷[16]等人做了一个静态条件下相同环境中挂片失重法与电阻探针法的测量腐蚀速度的对比实验。实验结果表明,挂片失重法中的挂片在投加缓蚀剂前后腐蚀速率变化不大,均为0.38mm/a左右,而电阻探针法在投加缓蚀剂前后测得的腐蚀速率有接近一倍的变化,投加前腐蚀速率为0.2266mm/a,而在添加缓蚀剂后腐蚀速率降为0.1185mm/a;
同样,电阻探针法也存在着一些缺点[9,17,20,22]:
(1)跟挂片失重法一样,电阻探针的腐蚀面部分正对,部分背对,部分侧对流体方向,导致电阻探针和被测管道内壁表面腐蚀量不一致。这种差异在高速流体和含固态杂质时尤为明显。这也是挂片法和电阻探针法在很多情况下误差极大,甚至不可信的主要原因;
(2)为了保证灵敏度,需要将试样的横截面加工得很薄,导致使用寿命很短。特别在腐蚀速率比较高的工况下,不适合采用电阻探针;
(3)非均匀腐蚀的发生对腐蚀速度的测量有很大的影响,具体结果受所用探针尺寸和几何形状因素的影响,不适用于局部腐蚀的检测;
(4)相对于电感探针,灵敏度较低,无法显示外界腐蚀条件的快速变化;
(5)如果有具有导电性的腐蚀产物或氧化皮聚集在探针表面,同样会影响探针的使用。例如在一些含硫化物的介质中,腐蚀会产生硫化亚铁,该物质具有导电性,对实际的损失量评估会造成影响[17];
(6)试样的材料与管道的材料必须严格一致,否则会带来较大误差;
(7)探针的加工工艺要求很高,测量探针的形状也会影响腐蚀速度的测量。例如左慧君[18]等人将MS3500E电阻探针成功应用于炼油设备,并将电阻探针测得的腐蚀速度与腐蚀挂片测得的腐蚀速度进行了对比,前者基本上要高于后者。这是因为采用了U形电阻探针,该探针针尖弯曲部分应力更为集中,影响了腐蚀速率的测量[23];
(8)虽然在电阻探针测量方法中加入了温度补偿单元进行温度补偿,但是由于焊接、制造工艺等因素,致使温度补偿电阻和探针电阻的阻值受温度变化不同步,仍然无法达到完全消除温度对测量值的影响[24]。
3 电感探针法
电感探针法,又称为磁阻探针法[7],起源于二十世纪九十年代[5]。不同于挂片法和电阻探针法,把腐蚀量转换为重量和电阻值的变化,电感探针法把腐蚀量的变化转化为电感值的变化,进而测得金属损耗[35]。
电感探针法主要是电磁感应原理制成的,主要是对探头内的线圈的电感值进行测量,如图4所示。
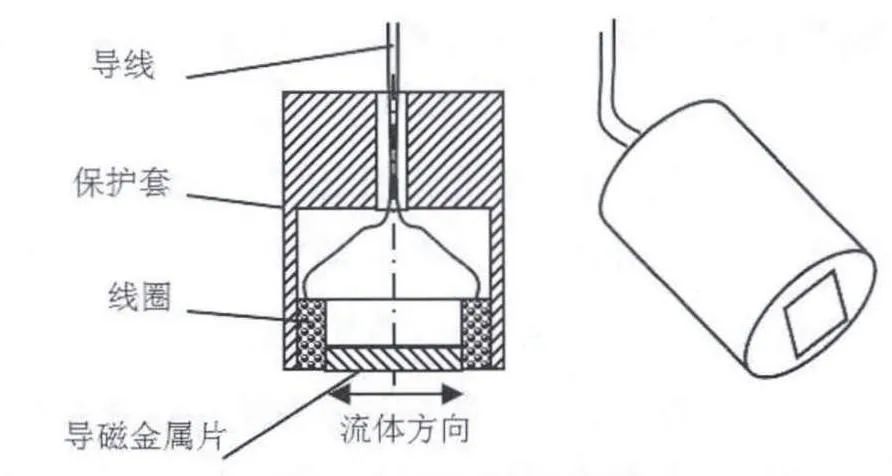
图4 电感探针示意图
在线圈两端置一恒定的交变电流,由于线圈和金属薄片的特定位置关系,此时线圈周围就会产生电磁场,当金属薄片的薄厚发生变化时,磁场强度发生变化,从而导致线圈的电感发生变化,因此,当金属薄片腐蚀变薄时,通过检测线圈电感的变化量,就可以推算出金属薄片的腐蚀量,从而计算出腐蚀速度[8,25]。
在电感探针法的计算公式中,设L为探头上线圈的电感量,主要影响L的因素为线圈匝数和总磁阻Rm决定的,在其它条件不变的条件下,而磁阻Rm主要受磁力线通路长度S、真空磁导率(空气中)μ0,铁磁物质相对磁导率μr以及通过磁力线的截面积A的影响[26],计算公式如下:

其中线圈磁阻Rm的构成如下:
由于电感探针法是电阻探针法的改进,因此它除了拥有电阻探针法优点外,还有一些其他优点[8,17,20,26-28]:
(1)灵敏度很高,可以达到30nm量级[27]。这是由于电感量的测量可以达到很高灵敏度的原因。笔者曾经做过实验,用研磨砂纸轻磨一下被测面,(约30nm),电感量就会有明显的变化;
(2)腐蚀面部分和流体方向一致,测量精度高。王志彬[29]等分别用电阻探针法和电感探针法对20号碳钢、Cr5Mo、1Cr18Ni9Ti做了实验,每组实验数据表明,电感探针比电阻探针的测量精度都要高;
电感探针法同样存在一些局限性[7,17,30]
(1)测量寿命较短。这是由于为了提高灵敏度,敏感元件导磁金属片一般设计为0.5mm。在腐蚀速率较大的情况下,探头的更换较频繁;
(2)不适宜用于长期监测管道的均匀腐蚀和局部腐蚀。这是由于影响电感量的因素较多,电感探针漂移大,稳定性较差。主要适合用在缓蚀剂投放量和运行控制系统中;
(3)由于该方法是基于发生腐蚀时敏感元件磁阻变化进行测量的,磁性高的材料最好,但会导致和被测管道材料不一致,从而影响测量精度;
(4)电感探针法中线圈所产生的交变电场强度同样也会受到温度波动的影响,导致测量精度下降。
4 超声波技术
由于超声波技术可以作为检测,也可以用作监测,具有能够直接测厚,而且数据直观,可信度高,测量准确、使用方便、声波的方向性好等优点,因此超声波技术是现在石化行业腐蚀监/检测中普遍使用的技术[31-32]。
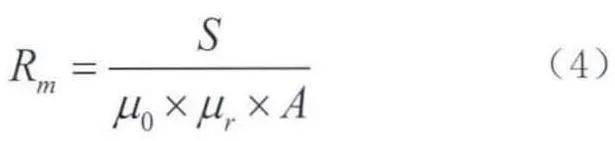
超声波测厚方法主要可分为三种[33]:脉冲反射法、穿透法和共振法。在管道腐蚀监测中,主要利用超声波脉冲反射法来实现管道腐蚀后剩余厚度的测量。脉冲反射法测管道壁厚如图5所示,其测量原理如下[34]:
图5 超声波测厚原理图
当测量装置发出的超声波沿被测管道垂直传播到管道内壁,到达内壁后超声波脉冲被反射回来,被测量装置感应到并接收,通过精确测量超声波的飞行(传播)时间来计算得出管道壁厚。计算公式如下:

其中V为超声波传播速度;t为飞行传播时间;T为管道厚度。
目前使用比较广泛的两种超声波测量技术是:压电超声测厚技术和电磁超声测厚技术[31]。
4.1 压电超声测厚技术
压电超声测厚技术的基本原理是[35]:利用压电晶体作为换能器来产生超声波,通过耦合剂的作用,超声波能较好地传入被测管道内,超声波到达管道内表面后返回,由换能器接收,转换成电脉冲,通过计算换能器发送超声波和接收到的反射波的时间差,再乘以超声波的声速就可以得出管道的壁厚。压电超声测厚技术的优点有[35-37]:
(1)无需插入管道,传感器不受腐蚀,使用寿命长;
(2)原理明晰、简单,可信度高;
(3)体积小、检测灵敏度较高,精度可达0.01mm。
缺点和局限性主要体现在以下几部分[38]:
(1)监测面积小,一般只有为1-2 cm2;
(2)压电探头只适用于半径较大的管道厚度的测量,因为压电探头只能产生平行声场,对于半径较小的管道,无法真实反映其实际厚度;
(3)被测管道内表面受腐蚀时,光洁度和轮廓变化很大,会大大影响测量效果。崔西明[39]等做了表面粗糙度对压电超声测厚影响的实验,总结了两点结论:一是造成超声波传播的不均匀,产生了散射;二是超声波的强度会大幅减弱;
(4)基于压电晶体的探头,目前国内外能够实际承受的温度小于180℃,在高温条件下(<180℃),为避免压电晶体失效,需要添加200~300m长的隔热导波片,使整个测量装置较为冗长[40]。
4.2 电磁超声测厚技术
电磁超声测厚技术是近十多年来特别热门的测量方法,如图6所示。它的基本原理是[36,37]:受磁铁和线圈作用的影响,金属表面的带电粒子将因为洛伦兹力的作用而产生振动,即产生的电磁超声的波源。该波源的能量沿被测体的厚度方向进行传播。在传播方向上的粒子将依次发生起振和消失的过程,形成超声波传播。当声波抵达被测体的下表面时,声波会发生反射或者透射,反射的声波继续沿金属板厚度的方向向上表面传播,直至抵达上表面,引发上表面的带电粒子的振动,产生感应电压被接收。通过获取电磁超声两个接收波之间的时间,可计算出被测体的厚度,计算公式如下:

其中V为超声波传播速度;t为飞行传播时间;d为管道厚度;θ为电磁超声的入射角度。
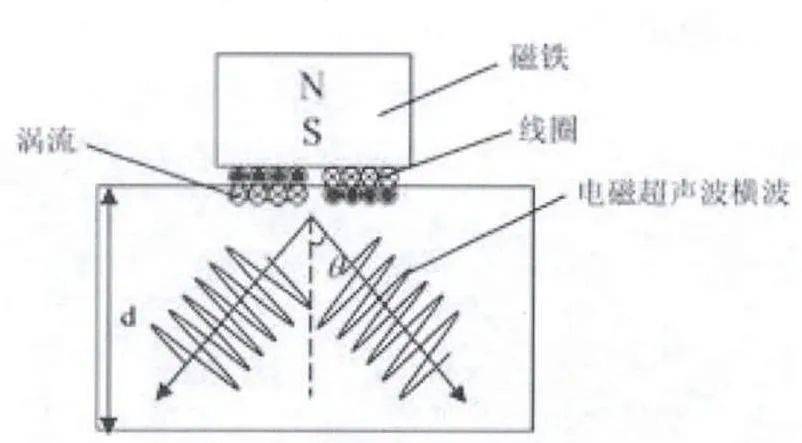
图6 电磁超声测厚原理图
电磁超声测厚技术的优点有[35-37,41-42]:
(1)电磁超声可不再使用耦合剂;
(2)能够实现非接触测量,精度可达30μm;
(3)对被测体表面要求不高,不再需要对粗糙的被测体表面进行打磨和去除保护层;
(4)压电超声只能产生一种频率类型的超声波,而电磁超声可以通过改变线圈形状和磁场方向来产生不同类型的超声波[43],使得它的检测范围也有增加。
虽然电磁超声测量技术相对于传统的压电超声检测技术有很多优点,但是它仍有自身的缺点和局限性[36,37,41,42]:
(1)相对于传统的压电超声换能器,电磁超声换能器换能效率很低,通常检测到的信号是μV级的,在现场使用时信噪比低,精度容易受环境影响;
(2)虽然电磁超声可实现非接触测量,但如果测量装置和被测体的提离距离过大,回波信号将呈指数幂衰减。我们的实验表明,提离距离超过1 mm时,信号基本上不能使用;
(3)在高温(居里温度的1/3)[42]环境下,永磁铁磁性将会大大降低而失效。目前直接用电磁超声在线长期厚度监测,温度一般不超过150度;
(4)一个探头测量的面积很小(1-2cm2),如果需要大面积测量,则需多个探头,这会导致整个测量装置成本很高。
5 场指纹法(FSM)
FSM是一种基于电位阵列的金属管道在线腐蚀监测方法,该方法是一种基于欧姆定律的无损检测技术。通过将电极矩阵分布到被测管道外,由于腐蚀过程相当于电阻变化过程,通过管道厚度变化与电阻变化的关系,即可检测出管道内的腐蚀量[44]。
5.1 FSM基本原理
如图7所示,为一实际FSM系统安装图。
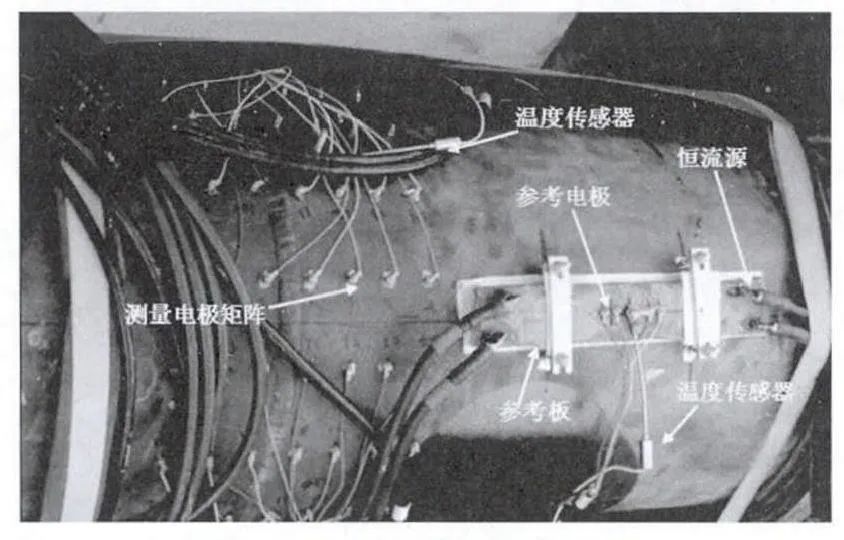
图7 FSM系统实际安装图
FSM需在测量区域内布置测量电极矩阵网络,每一对电极对应的是一测量区域,如图8所示[31]。测量系统中参考板与油气管道材料相同,并将两者串联。当注入恒定电流时,各测量电极对根据自身测量区域的情况,将测得不同的极间电压。参考板的作用主要是为了消除温度变化、激励电流不稳定以及噪声对测量区域内的极间电压的影响。工作时参考板上电极对间的电压作为参考电压。测量探针安装完毕后,需要在外面浇封一层绝缘层,可以将管道埋地,进行在线无开挖监测[44]。
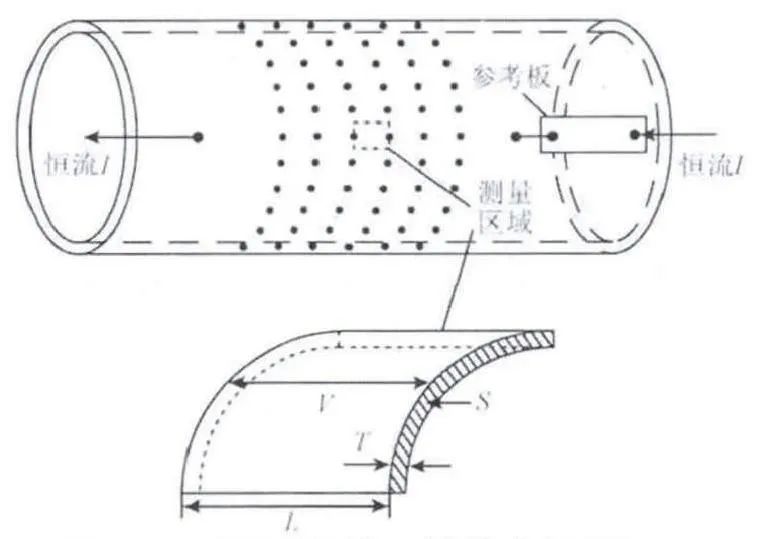
图8 FSM测量区域及等效电阻图
由图8中的等效电阻图可得,
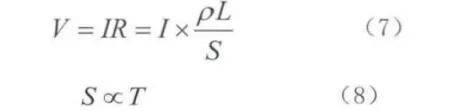
由式(7)、式(8)可得:

而任意电极对对应的测量区域的场指纹系数(FC值)为[42]:

其中Vi,j(tx)和Vi,j(t0)分别为在tx、t0时刻第i,j电极对测得的电压,Vref(tx)和Vref(t0)分别为在tx、t0时刻测得的参考电压,FCi,j为第i,j电极对的FC值,单位为ppt(part per thousand),t0时刻为管道没有发生腐蚀的初始时刻。
因此,通过式(9)、式(10)可计算出腐蚀厚度和剩余腐蚀厚度[31,44-45]:
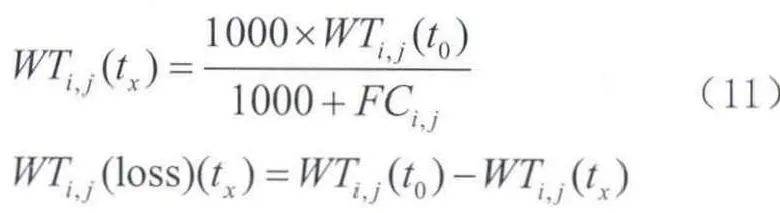
其中,WTi,j(tx)为tx时刻的腐蚀后剩余厚度,WTi,j(loss)(tx)为tx和t0时刻之间的腐蚀随时量,WTi,j(t0)为t0时刻的原始壁厚。
5.2 FSM优点及局限性
FSM由挪威学者H.Hangestad[46]在1983年首次提出,当时主要是用于海底结构、管道等腐蚀缺陷监测。由于腐蚀引起的极间电压为μV级的,而腐蚀引起的电压变化为亚纳伏级(10nV级),受当时元器件和仪表工业水平的限制,这一技术没有得到广泛地实际应用。1991年,挪威学者Srommen R D在前人的基础上,对FSM模型提出了改进[47-49],增加了一块材料与管道材料一致的参考板,该参考板位于管道外,且不发生腐蚀。它主要作用是通过测量电压与参考电压的比值关系来消除温度变化、电流和噪声的影响,同时提出了场指纹系数FC的概念,使FSM的实用价值得到了广泛地认同,并推广到陆地油管。FSM近几年在国内得到了较多的推广使用。该方法的优点有[31,44-45,50-52]:
(1)可以实现对均匀腐蚀、坑蚀、冲蚀等多种缺陷进行监测,这是前述几种技术无法达到的;
(2)检测精度高,特别是均匀腐蚀。例如均匀腐蚀可达0.05%WT、冲蚀可达5%WT,坑蚀10%WT精度;(WT:壁厚)
(3)监测面积大。以直径为Φ219mm的管道为例,超声波探头探测面积2cm2,一般情况下FSM应该设计为:轴向9针,周向14针,间距3.5x3.5cm,面积为:8 x 14 x 3.5 x 3.5=1372cm2,两者的监测面积比:1/686;
(4)不开孔,不开挖(除首次安装外),安全性好,可以在一些不可接触的、高危环境下实现在线监测,例如埋地管道、海底、高温高压和有毒环境等;
(5)使用寿命长(15年以上),可在高达450℃的环境下工作。没有腐蚀挂片、电阻探针和电感探针监测部件的损耗,便于维护。
FSM的局限性在于[31,44,45]:
(1)由于有仪器误差的存在出现漂移,特别是精密前置放大器的漂移以及温度变化引起的漂移;
(2)由于坑蚀所导致的电流分布不均匀,引起牵扯效应的存在,导致坑蚀监测精度不是很高,特别是对于小腐蚀坑的求解。例如国际上FSM领域的领导者Corrosion公司对小腐蚀坑的检测精度只能达到壁厚±10%[53];
(3)价格比较昂贵。
6 结论
本文几个重要的观点是:
(1)挂片法虽然价格低(在第一次安装时),但由于不便于信息化管理以及它的诸多缺点,将会比较快地被淘汰;
(2)电阻探针法适合在静态和准静态流体,以及腐蚀速率较低的情况下;
(3)电感探针灵敏度最高,适合在需要尽快知道短期(例如几个小时)腐蚀速率以便调整生产工艺参数的情况下使用。需要注意的是它的寿命较短,需及时更换,不适合长期监测使用;
(4)超声波能够直接测厚,可信度高。由于在管外监测,安全性好,无腐蚀损耗。缺点是监测面积小。如果管道内壁为非均匀腐蚀,应考虑安装超声波矩阵;
(5) FSM在常用的在线监测技术中,综合性能最好,是一项特别优秀的无损监测技术。主要缺点是价格比较高,小腐蚀坑的求解精度不高。因此,对国产FSM技术和设备的研究开发,提高坑蚀监测精度,千方百计地降低价格具有重要意义。
本文通过对常用的5种管道腐蚀监测技术的阐述,可以为相关企业在选择和应用不同的监测技术提供有益的参考
